Rebelway Houdini中Apex与Kinefx生物绑定大师班



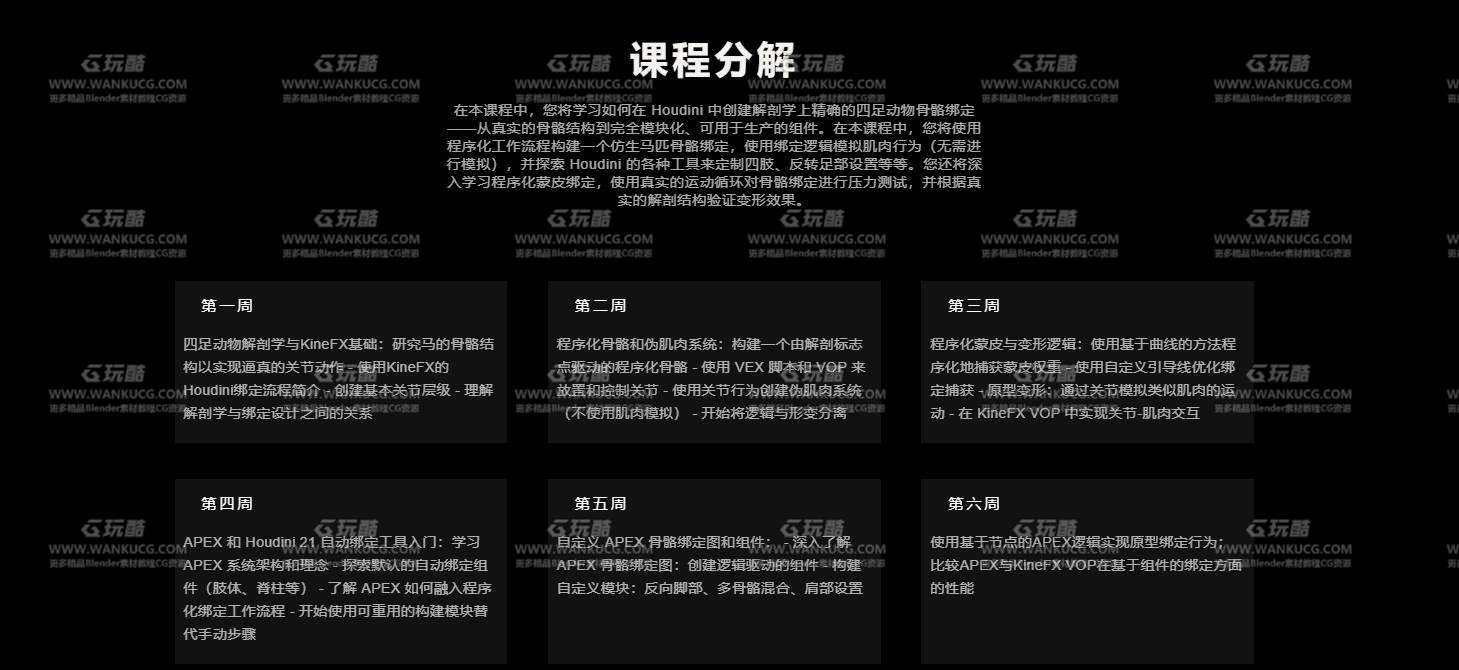

本课程聚焦 Houdini 软件的程序化四足动物绑定技术,打破 “绑定仅靠手动调整” 的传统模式,通过 “解剖学逻辑→程序化工具→生产级控件” 的完整链路,帮助学习者打造符合真实生物运动规律、且能高效适配影视 / 游戏生产需求的四足动物绑定系统,具体内容拆解如下:
一、基础:基于真实解剖学的四足动物运动逻辑
绑定的核心是 “让数字模型‘活’得真实”,而真实的关键在于解剖学基础 —— 课程首先会建立 “技术与生物科学” 的连接,避免绑定效果 “形似神不似”:
核心解剖结构解析:聚焦四足动物(如狗、马、鹿等常见影视 / 游戏题材物种)的关键运动部位,讲解骨骼结构(如脊柱的分节、四肢的骨骼连接方式)、肌肉附着逻辑(如肩部肌群如何带动前腿运动、臀部肌群如何影响后腿发力)、关节活动范围(如膝关节的 “向前折” 与肘关节的 “向后折” 差异、脊柱的侧弯 / 屈伸极限)。
运动规律与绑定映射:将解剖学知识转化为绑定技术语言 —— 例如,如何通过 “脊柱分段绑定” 还原四足动物奔跑时的 “脊柱起伏”(前屈 / 后伸配合侧弯),如何通过 “肩部 IK/FK 切换” 模拟不同场景下的腿部运动(如行走时的自然摆动、跳跃时的主动发力),确保绑定后的模型运动符合真实生物的物理惯性与肌肉张力。
二、核心:Houdini 程序化四足绑定的技术实现
Houdini 的优势在于 “程序化节点工作流”,课程会重点教授如何用节点逻辑替代重复手动操作,实现 “可复用、可调整、可批量适配” 的四足绑定系统:
程序化骨骼系统搭建:
利用 Houdini 的Bone节点与Rig VOP模块,创建 “参数化骨骼链”—— 例如,通过调节 “脊柱节段数”“四肢骨骼长度比例” 等参数,快速适配不同体型的四足动物模型(无需为每一个模型重新手动搭建骨骼)。
借助Attribute Wrangle节点编写表达式,实现骨骼的 “自动对齐模型拓扑”(如骨骼位置自动匹配模型的肌肉轮廓)、“关节极限自动计算”(基于解剖学数据设定关节旋转范围,避免出现超自然的关节扭曲)。
程序化控制器与约束系统:
用Null对象结合Constraint节点(如Parent Constraint父约束、Pivot Constraint枢轴约束),构建 “层级化控制体系”—— 例如,通过 “根控制器” 控制整体移动,“脊柱控制器” 控制躯干弯曲,“腿部 IK 控制器” 控制四肢迈步,且各控制器之间通过程序化逻辑关联(如移动脊柱时,四肢自动微调以保持地面接触)。
利用CHOPs(通道操作)模块制作 “程序化运动周期”,例如通过节点生成基础的行走 / 奔跑循环曲线,再通过参数调整(如步频、步幅)快速适配不同运动速度,减少后续动画阶段的重复工作。
肌肉与皮肤变形的程序化驱动:
结合 Houdini 的Muscle节点与VEX脚本,实现 “骨骼运动→肌肉变形→皮肤跟随” 的自动关联 —— 例如,当腿部骨骼伸展时,腿部肌肉自动 “拉伸 / 收缩”,并通过Capture节点将肌肉变形效果传递到皮肤模型,避免皮肤出现 “穿帮”(如关节处皮肤褶皱不自然、肌肉运动无跟随)。
用Attribute Transfer节点实现 “细节化变形控制”,例如为腹部、颈部等柔软部位添加 “权重衰减” 参数,让皮肤变形在 “刚性骨骼运动” 与 “柔性肌肉过渡” 之间找到平衡,提升真实感。
三、落地:生产级绑定控件的优化与交付
课程最终目标是 “让绑定成果能直接用于实际生产”,因此会重点教授如何将程序化绑定系统转化为 “动画师易用、技术总监(TD)易维护” 的生产级控件:
直观化控制界面设计:
利用 Houdini 的Custom Interface(自定义界面)功能,将复杂的程序化参数(如骨骼节段数、肌肉张力、关节极限)整合为 “动画师友好” 的控制面板 —— 例如,用滑块调节 “脊柱弯曲程度”,用按钮切换 “IK/FK 模式”,用下拉菜单选择预设的 “运动风格”(如 “轻盈跳跃”“沉重行走”),无需动画师理解底层节点逻辑。
绑定系统的稳定性与兼容性优化:
教授 “生产级检查技巧”:如何通过Rig Doctor工具排查绑定中的 “约束冲突”“骨骼权重错误”,如何测试极端运动场景(如四足动物站立、蹲伏、跳跃)下的模型变形是否正常,避免后续动画制作中出现 “控件失效”“皮肤穿帮” 等问题。
讲解 “绑定成果的交付规范”:如何导出绑定文件(如.hip格式的场景文件),如何为动画师提供 “绑定说明文档”(标注各控件功能、参数调整范围、常见问题解决方案),确保绑定系统能无缝对接后续的动画、灯光、渲染流程。
实战案例:从 0 到 1 完成完整四足绑定:
课程会以一个具体的四足动物模型(如 “影视级猎犬”“游戏级战马”)为案例,从头到尾演示完整绑定流程:从导入模型、分析解剖结构,到搭建程序化骨骼、制作肌肉变形系统,再到设计控制界面、测试交付 —— 让学习者通过 “实战复刻” 掌握技术细节,同时理解不同生产需求(如影视高精度绑定 vs 游戏低面数高效绑定)下的调整思路。
通过本课程,学习者不仅能掌握 Houdini 程序化绑定的技术细节,更能建立 “‘真实解剖学’指导‘技术实现’,‘技术实现’服务‘生产需求’” 的绑定思维 —— 无论是后续制作影视级四足动物动画、游戏中的可控四足角色,还是开发可复用的四足绑定工具集,都能具备 “从原理到落地” 的完整能力。